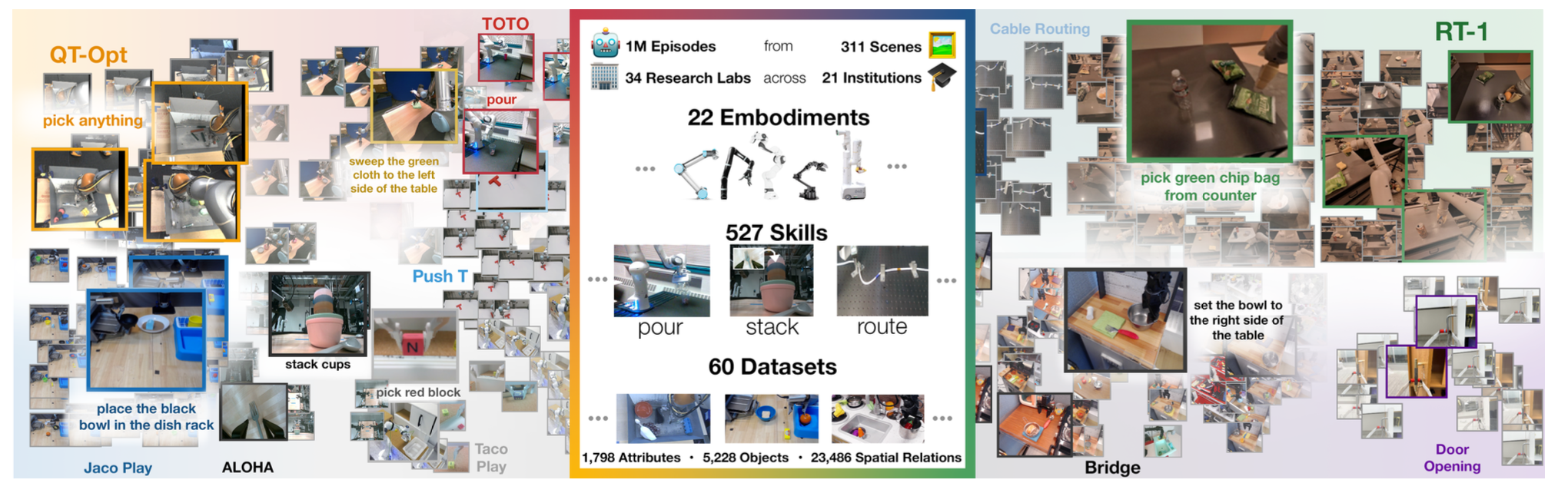
We introduce the Open X-Embodiment Dataset, the largest open-source real robot dataset to date. It contains 1M+ real robot trajectories spanning 22 robot embodiments, from single robot arms to bi-manual robots and quadrupeds.
We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms.